
The two most common UAS platform types are best classified as ‘multi-rotors’ and ‘fixed wings’. Multi-rotors commonly have 4 to 8 spinning rotors that provide both lift and navigation through differential thrust. In contrast, fixed wings typically have one propeller providing thrust while generating lift and navigation over a wing(s) with dedicated control surfaces (like a rudder or elevons). Kites and balloons can also be effective sensor platforms in some conditions, and hybrid Vertical Take-Off and Landing (VTOL) systems may have widespread uses after a few more years of development.
| Performance / Platform | Multi-rotor | Fixed-wing |
| Optimal cruise speed | Slower (<10m/s) | Faster (>14m/s) |
| Flight duration | Shorter (~6-30 min) | Longer (25-120 min) |
| Flight operations | Requires only limited training | Requires more experience* |
| Best Mapping Use | Small extent, fine grain | Larger extent, coarser grain |
*specifically for takeoff and landings and optimizing flight-time via mission planning
What we’re using and other suggested* platforms:
*There are many solutions out there – tell us what you think/like!
Multi-rotors:
Tarot 680 (custom built from kit) – These UAVs are based on the Tarot 680PRO Hexacopter folding frame and a Pixhwak flight controller running ArduCopter software. We used these extensively in 2015 & 2016, and they offer a customizable platform for a variety of sensors but have required significant time investment in trouble shooting and have a short flight time (<10min when carrying sensors). [Costs for original components including RC, etc. was around $1000 USD, but we spent several hundred dollars replacing and modifying parts and more on sensor and ground control station.]

A Tarot 680PRO on the tundra.
DJI Phantom 4 Advanced or Pro – widely used, easy to fly, good value [~$1100 – 1600 USD with accessories and spare parts], good flight duration (25+min), comes with relatively high quality RGB camera (20mp 1-inch sensor that captures in RAW, same as Sony RX100 [below]) useful for RGB mapping and outreach videography. Can be modified to carry small multispectral cameras – recommended entry point model due to reliability and flexibility for cost level. Other DJI models will also be tested this summer by various participants (DJI Mavic Pro [~$1000 USD], DJI Phantom 3 Pro [~$600 USD]).
3DR Solo or Iris+ – lowest cost [~$300-500 USD without sensor], compatible with open source mission planning software, readily customizable – models may not be available everywhere. Slightly less of a ‘turn key’ solution than the DJI Phantom 4 models with significantly shorter flight times.

Fixed wings:
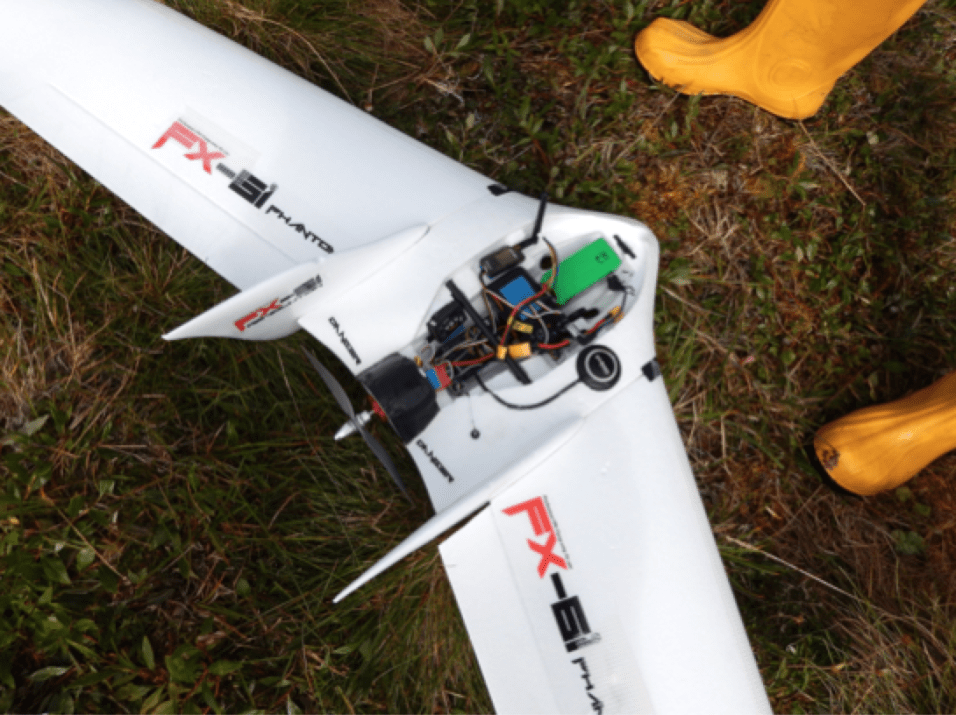
Zeta FX-61 (kit) – custom built in-house with a pixhawk/pixhawk2 flight controller. Customizable platform, but benefits from past experience piloting and planning missions helpful to optimize flight times and to fly consistent missions. Can share build specs and tips with interested parties. [Costs ~$700 USD (pictured below) – $2500 USD without sensor depending on the set up].
Parrot Disco Ag – Will be field testing this summer – looks like a promising trade off between much more expensive commercial options and custom built systems. Expecting this unit to be relatively user friendly and designed to carry small multispectral camera (Parrot Sequoia). Stay tuned! Costs [~$4995 USD, but this includes the cost of a $3,500 USD multispectral sensor].

SenseFly eBee – A relatively high-cost [~$7,000 – 30,000 USD] commercial option that is widely used and tested – though not by core team members. Can carry a small point-and-shoot RGB or multispectral cameras like the Sequoia.
